【数码相机-相机标定——四个坐标系介绍】此文章归类为:[ "数码相机" ]。 世界坐标系(Xw,Yw,Zw) 世界坐标系是一个用于描述和定位三维空间中物体位置的坐标系,通常反映真实世界下物体的位置和方向。它是一个惯性坐标系,被用作整个场景或系统的参考框架。在很多情况下,世界坐标系被认为是固定不变的,
原创 周杰伦 7个月前 阅读: 187 阅读时长: 2分钟
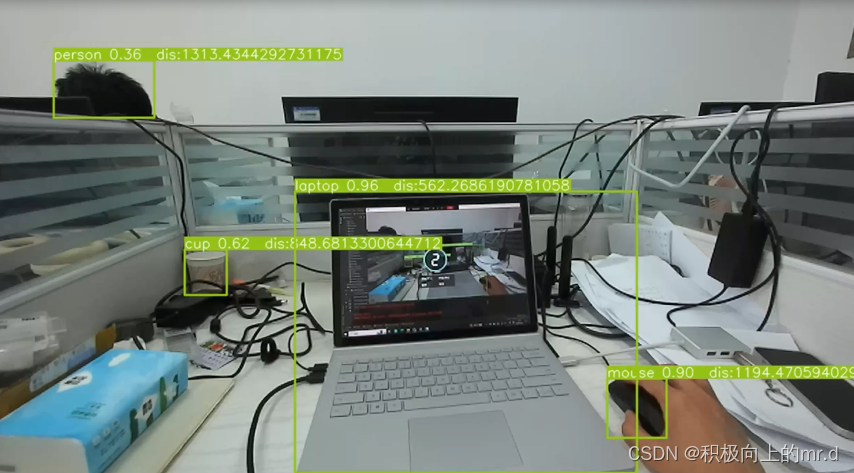
【yolo-yolov9直接调用zed相机实现三维测距(python)】此文章归类为:[ "yolo", "python", "数码相机", "开发语言" ]。 yolov9直接调用zed相机实现三维
原创 周杰伦 7个月前 阅读: 155 阅读时长: 9分钟
【数码相机-康谋分享 | aiSim5 物理相机传感器模型验证方法(一)】此文章归类为:[ "数码相机" ]。 摘要: aiSim5可以实时模拟复杂的传感器配置,在多GPU分布式渲支持的支持下,aiSim可以渲染20多个摄像头、10多个雷达和10多个激光雷达在同一环境下运行。aiSim5独有的实时渲染引擎能够满
原创 周杰伦 7个月前 阅读: 185 阅读时长: 8分钟
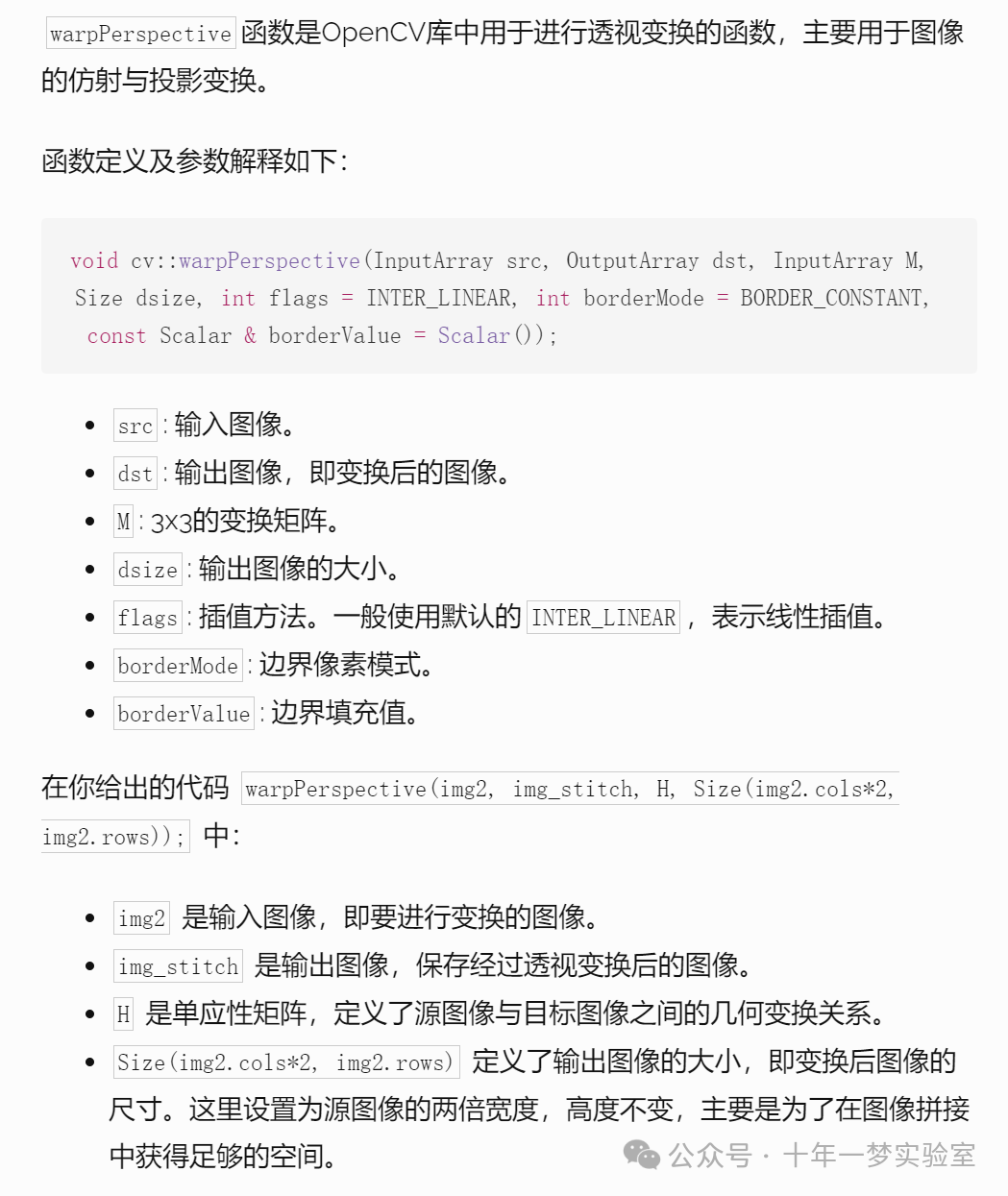
【计算机视觉-【opencv】教程代码 —features2D(5)旋转相机的基本全景拼接】此文章归类为:[ "计算机视觉", "人工智能", "opencv", "数码相机" ]。 基本全景拼接 panorama_stitching_rotating_camera.cpp 将第二张图像进行透视变换后与第一张图像拼
原创 周杰伦 7个月前 阅读: 202 阅读时长: 9分钟
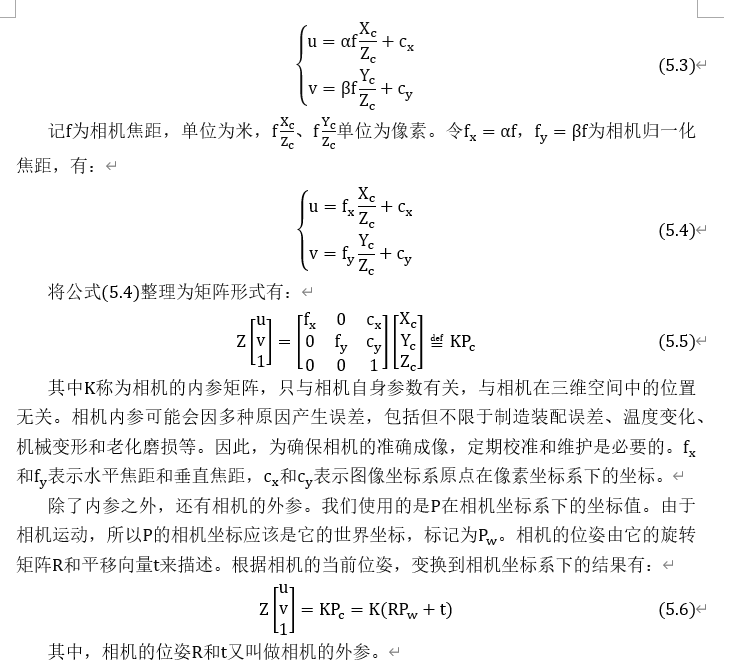
【计算机视觉-6_相机坐标系_相机4个坐标系详述】此文章归类为:[ "计算机视觉", "人工智能", "数码相机" ]。 相机系列文章是用来记录使用opencv3来完成单目相机和6轴机械臂手眼标定。本人吃饭的主职是linux下6轴机械臂相关应用开发。但对于机械臂运动学、相机应用等都非常感兴趣,所以对一些线
原创 周杰伦 7个月前 阅读: 165 阅读时长: 7分钟
【数码相机-线阵相机如何选型】此文章归类为:[ "数码相机" ]。 线阵相机特点 1.线阵相机使用的线扫描传感器通常只有一行感光单元(少数彩色线阵使用三行感光单元的传感器) 2.线阵相机每次只采
原创 周杰伦 7个月前 阅读: 129 阅读时长: 3分钟
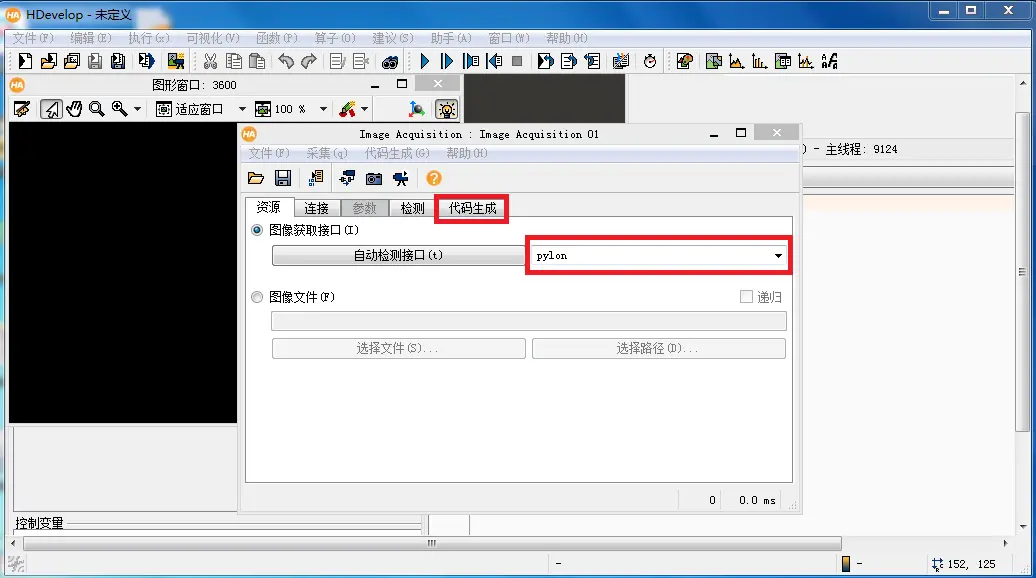
【数码相机-工业相机采图方式、图像格式(BYTE、HObject和Mat)转换】此文章归类为:[ "数码相机" ]。 1、概述 机器视觉项目中,如何采集到合适的图像是项目的第一步,也是最重要的
原创 周杰伦 8个月前 阅读: 149 阅读时长: 9分钟
【学习-相机学习的知识积累】此文章归类为:["学习","数码相机"]。 六个问题理解ISP全流程_哔哩哔哩_bilibili ISP (Image Signal Processing) - NPTEL公开课_哔哩哔哩_bilibili ISP Pipline_isp pipeline-CSDN博客 摄像头camera基础知识_哔哩哔哩_bilibili ISP Pipline_
原创 周杰伦 8个月前 阅读: 276 阅读时长: 2分钟
【数码相机-uni-app 安卓手机判断是否开启相机相册权限】此文章归类为:["数码相机","uni-app"]。 // 安卓相机权限 androidCameraPermiss(index){ &n
原创 周杰伦 8个月前 阅读: 166 阅读时长: 9分钟
【计算机视觉-基于openCV实现的单目相机行人和减速带检测】此文章归类为:["计算机视觉","人工智能","opencv","数码相机"]。 概述 在计算机视觉项目中,相机标定是一项至关重要的任务,因为它可以校正相机内部参数,消除因镜头畸变等因素导致的图像失真,从而提高后续图像处理和分析的精度。在这个项目中,相机标定的核心功能集成在名为`calibration.py`
原创 周杰伦 8个月前 阅读: 249 阅读时长: 9分钟