数码相机-立体相机标定
推荐 原创相机成像过程中涉及的4个坐标系:
1、世界坐标系:由用户定义的三维世界坐标系,描述物体和相机在真实世界中的位置,原点可以任意选择。
2、相机坐标系:以相机的光心为坐标原点,X轴和Y轴平行于图像坐标系的X轴和Y轴,Z轴为相机的光轴。
3、图像坐标系:与成像平面重合,以成像平面的中心(光轴与成像平面的交点)为坐标原点,X轴和Y轴分别平行于成像平面的两条边。
4、像素坐标系:与成像平面重合,以成像平面的左上角顶点和原点,X轴和Y轴分别平行于图像坐标系的X轴和Y轴。
相机成像过程:
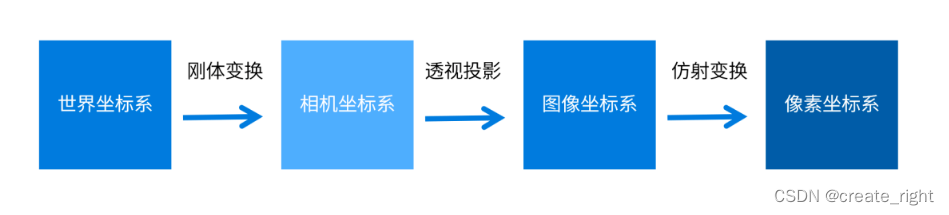
(1)世界坐标系---相机坐标系
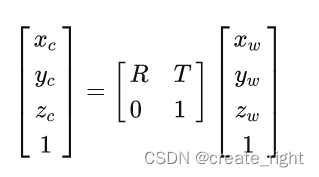
R表示旋转矩阵,T表示平移矩阵。
(2)相机坐标系---图像坐标系
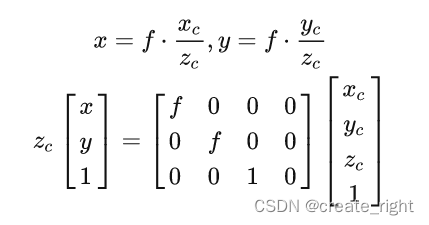
f表示焦距。
(3)图像坐标系---像素坐标系
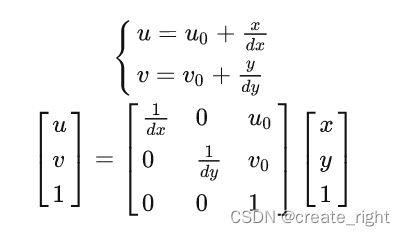
综合上述,得
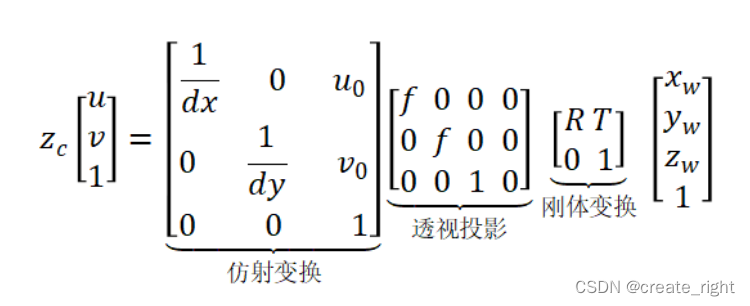
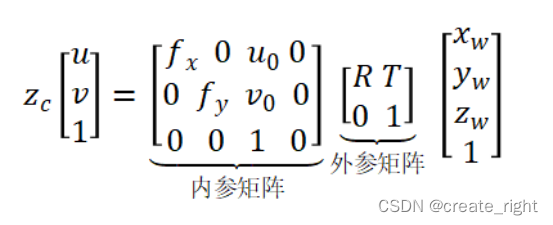
内参矩阵取决于相机内部参数,外参矩阵取决于相机坐标系和世界坐标系的位置。而相机标定,就可以帮我们求解出内参矩阵和外参矩阵。
相机标定的目的:计算出相机的内参数和畸变参数矩阵,通过畸变改正模型完成校正,进而输出无畸变的图像。
更多【数码相机-立体相机标定】相关视频教程:www.yxfzedu.com
相关文章推荐
- 小程序-社区团购小程序系统源码+各种快递代收+社区便利店 带完整的搭建教程 - 其他
- spring-Java之SpringCloud Alibaba【八】【Spring Cloud微服务Gateway整合sentinel限流】 - 其他
- 云原生-云原生周刊:Gateway API 1.0.0 发布 | 2023.11.6 - 其他
- java-Ruby语言和VCR库编写代码示例 - 其他
- spring-C#开发的OpenRA游戏之世界存在的属性CombatDebugOverlay(3) - 其他
- 编程技术-Linux文件系统 - 其他
- 电脑-电脑硬盘数据恢复哪个好?值得考虑的 8 个硬盘恢复软件解决方案 - 其他
- jvm-内存管理 - 其他
- 算法-吴恩达《机器学习》7-1->7-4:过拟合问题、代价函数、线性回归的正则化、正则化的逻辑回归模型 - 其他
- 前端-vue项目js原生属性IntersectionObserver实现图片懒加载 - 其他
- 编程技术-Python标准库有哪些 - 其他
- 编程技术-读取W25Q64的设备ID时输出0xff - 其他
- 金融-可以写进简历的软件测试项目(银行/金融/电商/商城......) - 其他
- 百度-想要创建百度百科词条怎么做? - 其他
- c#-C#基于inpoutx64读写ECRAM硬件信息 - 其他
- java-JavaScript如何实现钟表效果,时分秒针指向当前时间,并显示当前年月日,及2024春节倒计时,源码奉上 - 其他
- c++-Linux驱动应用层与内核层之间的数据传递 - 其他
- 人工智能-读书笔记:彼得·德鲁克《认识管理》第11章 若干例外及经验教训 - 其他
- 运维-短时间不点击云服务器,自动化断开连接,怎么设置长时间 - 其他
- 运维-Rocky Linux 配置邮件发送 - 其他
记录自己的技术轨迹
文章规则:
1):文章标题请尽量与文章内容相符
2):严禁色情、血腥、暴力
3):严禁发布任何形式的广告贴
4):严禁发表关于中国的政治类话题
5):严格遵守中国互联网法律法规
6):有侵权,疑问可发邮件至service@yxfzedu.com
近期原创 更多
