计算机视觉-PicoDet:专为移动CPU优化的快速目标检测
推荐 原创概述
PicoDet是在2021年11月发布的一种机器学习模型。它将最近在目标检测模型方面的研究成果集成到一个轻量级模型中,以在移动CPU上实现高准确度和高速目标检测。
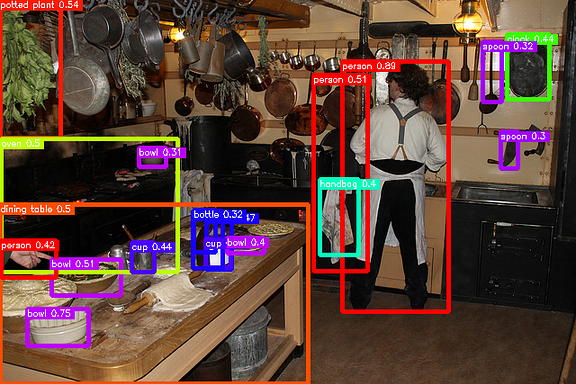
COCO dataset
架构
PicoDet通过使用轻量级结构作为骨干,提高了特征提取的速度。通过改进损失函数,它还提高了训练的稳定性和效率。
最近几年来,基于无锚点的检测器在目标检测中变得越来越受欢迎,而全卷积单阶段目标检测(FCOS)解决了重叠的地面实况标签问题。而典型的锚框为每个坐标都有多个锚点,FCOS为每个坐标只有一个中心点;使用FCOS的无锚点方法具有无需超参数调整的优势。
然而,通常无锚点的检测器用于服务器端处理的模型,这些模型相对较大。用于移动应用的无锚点模型仅限于NanoDet和YOLOX-Nano。对于轻量级无锚点检测器来说,很难平衡准确性和效率。PicoDet是一种受FCOS和广义焦点损失(GFL)启发的新尝试。
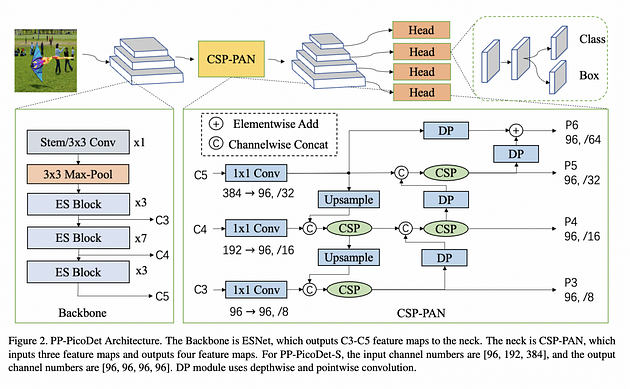
PicoDet
CSP是ResNet等模型中使用的“跳跃连接”机制的进化。它通过添加一个机制来切断和连接先前阶段的特征图,而无需进行卷积运算,从而便于反向传播并减少操作量。在PicoDet中,将3x3深度卷积扩展为5x5深度卷积,以扩大感受野。
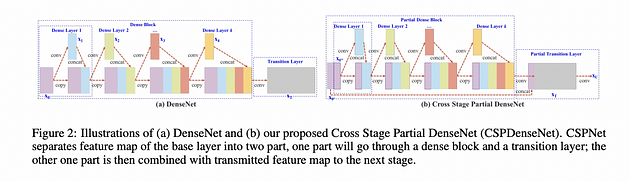
CSPNet
为了改善标签分配策略,采用了SimOTA,并采用了Varifocal Loss(VFL)和GIoU损失作为损失函数。
SimOTA也用于YOLOX。在确定预测边界框与地面实况边界框之间的映射以计算损失时,该方法不是分配最近的地面实况,而是解决了一个优化问题,以分配更合适的地面实况。SimOTA是OTA(Optimal Transport Assignment)的更快版本。
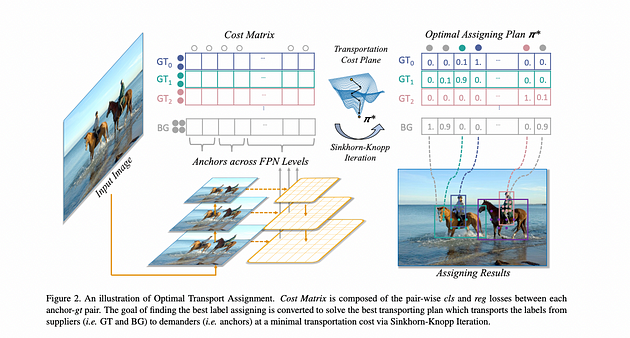
SimOTA
在这个目标检测模型中,通过将地面实况边界框分配给HEAD预测的每个边界框,并反向传播损失来进行学习。地面实况边界框可能会重叠。如果预测边界框落在该区域内,我们将出现一种称为“模糊锚点”的情况,我们不知道要分配哪个地面实况。OTA具有一种算法,使将地面实况边界框分配给模糊锚点变得困难。
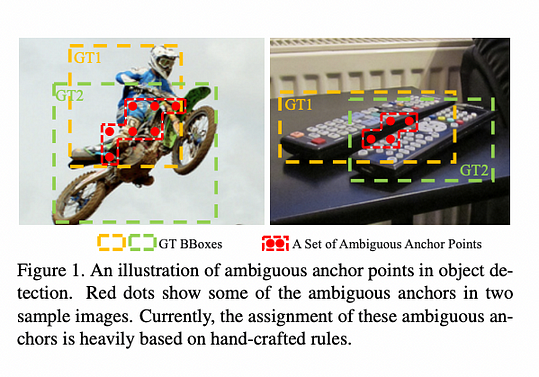
模糊锚点
以下是OTA分配的结果示例。图像中的点是预测边界框的中心点,红色椭圆显示了分配策略的差异。
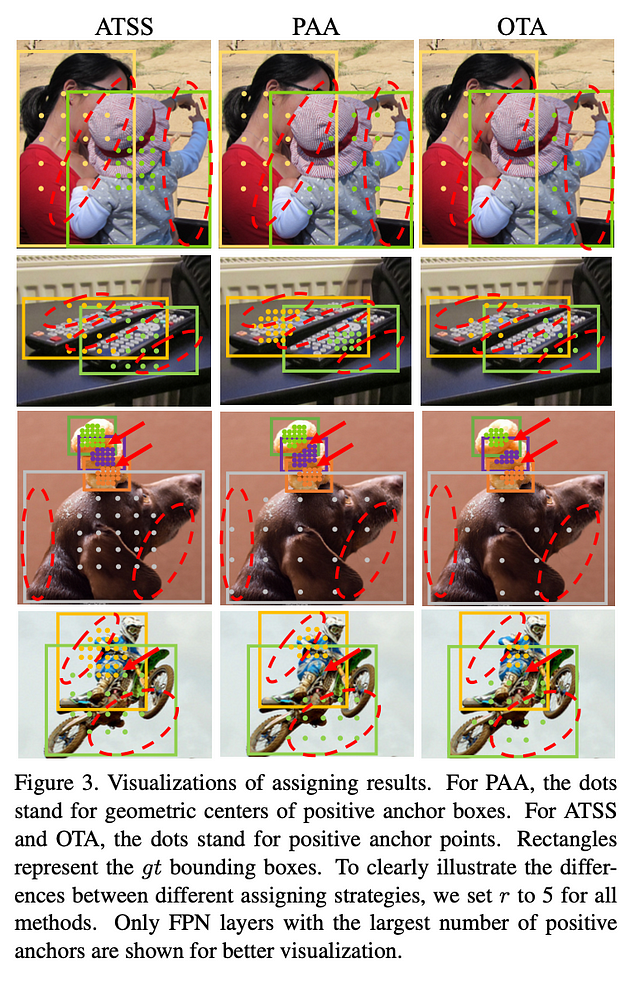
OTA分配的结果
PicoDet中用于特征提取的骨干是Enhanced ShuffleNet,这是ShuffleNetV2的改进版本,是一种适用于移动设备的高效模型架构。ShuffleNet引入了“逐点组卷积”和“通道混洗”操作,以加速1x1卷积,这是MobileNet的瓶颈。
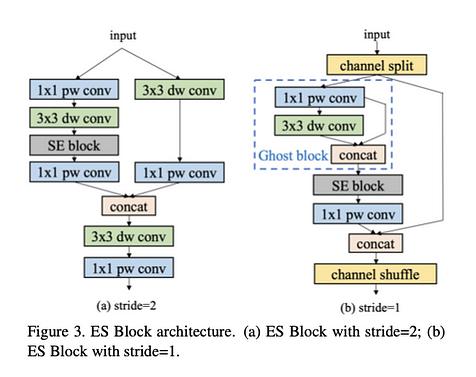
Enhanced ShuffleNet
一次性神经架构搜索(NAS)被引入以搜索每层的最佳通道数量。搜索结果显示,使通道数量成为8的倍数对提高推断速度的贡献最大。
性能
以下是使用高通骁龙865 CPU的性能。在使用NCNN在CPU上运行时,YOLOX-Tiny在mAP 32.8时需要32.77毫秒,而PicoDet在mAP 30.6时需要12.37毫秒。在17.39毫秒内可以实现mAP 34.3。
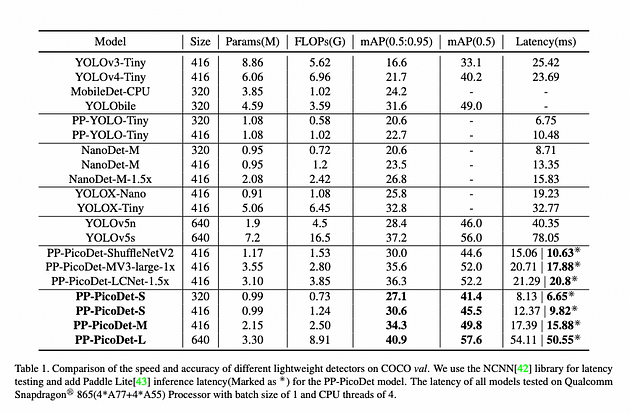
这种性能提升是在CPU上运行推断时可以测量到的,而在GPU上运行时它们表现相同。因此,YOLOX-Tiny可能更适用于Jetson设备,而PicoDet可能最适合树莓派等设备。
用法
可以使用以下命令将PicoDet与ailia SDK一起用于检测网络摄像头视频流中的对象。
$ python3 picodet.py -v 0ax Inc. 开发了ailia SDK,该SDK支持跨平台、基于GPU的快速推断。ax Inc. 提供从咨询和模型创建到基于AI的应用程序和SDK开发的广泛服务。如有任何疑问,请随时与我们联系。
· END ·
HAPPY LIFE
本文仅供学习交流使用,如有侵权请联系作者删除
更多【计算机视觉-PicoDet:专为移动CPU优化的快速目标检测】相关视频教程:www.yxfzedu.com
相关文章推荐
- 论文阅读-kimera论文阅读 - 其他
- java-JavaScript使用正则表达式 - 其他
- c#-钉钉企业微应用开发C#+VUE - 其他
- makefile-c - 其他
- 人工智能-Adobe:受益于人工智能,必被人工智能反噬 - 其他
- asp.net-vue+asp.net Web api前后端分离项目发布部署 - 其他
- 编程技术-程序员怎样才能学好算法?这本书送几本给大家! - 其他
- node.js-Node.js如何处理多个请求? - 其他
- golang-【二、http】go的http基本请求设置(设置查询参数、定制请求头)get和post类似 - 其他
- 算法-平面和射线交点 - 其他
- 编程技术-从白日梦到现实:推出 Elastic 的管道查询语言 ES|QL - 其他
- 前端-Redisson实现延迟队列 - 其他
- 编程技术-MATLAB|怎么将散点图替换成图片 - 其他
- 科技-第二证券:消费电子概念活跃,博硕科技“20cm”涨停,天龙股份斩获10连板 - 其他
- 科技-思谋科技进博首秀:工业多模态大模型IndustryGPT V1.0正式发布 - 其他
- 科技-智能井盖传感器功能,万宾科技产品介绍 - 其他
- 科技-专访虚拟人科技:如何利用 3DCAT 实时云渲染打造元宇宙空间 - 其他
- 机器学习-Azure 机器学习 - 使用 ONNX 对来自 AutoML 的计算机视觉模型进行预测 - 其他
- 缓存-Redisson中的对象 - 其他
- 科技-伊朗黑客对以色列科技和教育领域发起破坏性网络攻击 - 其他
2):严禁色情、血腥、暴力
3):严禁发布任何形式的广告贴
4):严禁发表关于中国的政治类话题
5):严格遵守中国互联网法律法规
6):有侵权,疑问可发邮件至service@yxfzedu.com
- CTF对抗-CSAW-CTF-Web部分题目
- CTF对抗-2022MT-CTF Re
- 编程技术-逆向IoRegisterPlugPlayNotification获取即插即用回调地址,配图加注释超级详细
- 软件逆向-针对百度旗下的一个会议软件,简单研究其CEF框架
- Android安全-逆向篇三:解决Flutter应用不能点击问题
- Android安全-Android - 系统级源码调试
- Android安全-逆向分析某软件sign算法
- 软件逆向-APT 双尾蝎样本分析
- 编程技术-利用GET请求从微软符号服务器下载PDB
- 编程技术-NtSocket的稳定实现,Client与Server的简单封装,以及SocketAsyncSelect的一种APC实现
