自动驾驶-深度学习/自动驾驶数据集大集合(目标检测/图像分割/语义分割/图像分类/)
推荐 原创深度学习和自动驾驶技术的发展离不开高质量的数据集,这些数据集对于训练和验证各种自动驾驶算法和模型起着至关重要的作用。深度学习/自动驾驶数据集大集合是一项汇集了多种场景、多种数据类型的数据资源,旨在为深度学习和自动驾驶领域的研究者和从业者提供丰富的实验数据和标注信息。
首先,该数据集大集合涵盖了包括城市道路、高速公路、乡村道路等多种道路环境下的图像、视频和传感器数据。这些数据来自不同地区、不同时间段和不同天气条件下的真实交通场景,具有很好的代表性和多样性。通过这些数据,研究人员可以对自动驾驶系统在不同情境下的性能进行全面评估和验证。
其次,深度学习/自动驾驶数据集大集合还包含了丰富的标注信息,如车辆位置、行驶轨迹、交通标识、行人和其他车辆的检测信息等。这些标注信息为研究者提供了宝贵的参考,有助于他们进行更深入的数据挖掘、算法训练和模型验证。同时,这些标注信息也为自动驾驶算法的开发和测试提供了有力支持。
最后,深度学习/自动驾驶数据集大集合的发布将有助于促进自动驾驶技术的发展。研究人员和工程师可以利用这些数据集开展各种相关研究,如车辆感知、路径规划、智能交通信号灯控制等方面。同时,这些数据还能够为自动驾驶系统的开发和测试提供坚实的基础,推动自动驾驶技术向更加成熟和可靠的方向发展。
总的来说,深度学习/自动驾驶数据集大集合为深度学习和自动驾驶领域的研究和应用提供了丰富而有力的支持,有助于推动自动驾驶技术的不断进步和完善。
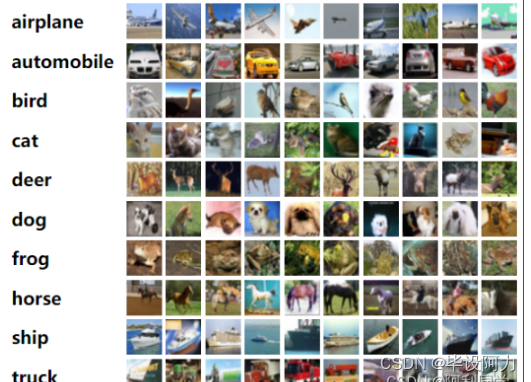
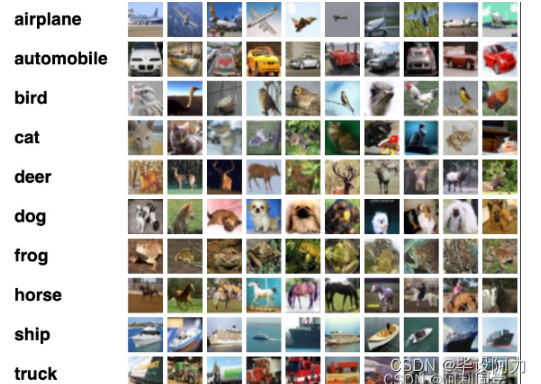
CIFAR-10数据集
CIFAR-10数据集(加拿大高级研究所,10类)是 Tiny Images 数据集的一个子集,由60000个32x32彩色图像组成。这些图片被贴上了10个相互排斥类别的标签: 飞机、汽车(但不包括卡车或皮卡)、鸟、猫、鹿、狗、青蛙、马、船和卡车(但不包括皮卡)。每个班有6000张图片,每个班有5000张训练图片和1000张测试图片。
ImageNet数据集
根据 WordNet 层次结构,ImageNet 数据集包含14,197,122个带注释的图像。自2010年以来,该数据集被用于 ImageNet 大规模视觉识别挑战(ILSVRC) ,一个图像分类和目标检测的基准。公开发布的数据集包含一组手动注释的训练图像。还发布了一组测试映像,并且保留了手动注释。ILSVRC 注释可以分为两类: (1)图像级注释的二进制标签的存在或不存在的对象类在图像中,例如,“有汽车在这个图像”,但“没有老虎”,和(2)对象级注释的一个紧密的边界框和类标签周围的对象实例在图像中,例如,“有一个螺丝刀居中的位置(20,25) ,宽度为50像素,高度为30像素”。ImageNet 项目不拥有图像的版权,因此只提供图像的缩略图和 URL。

COCO (Microsoft Common Objects in Context)数据集
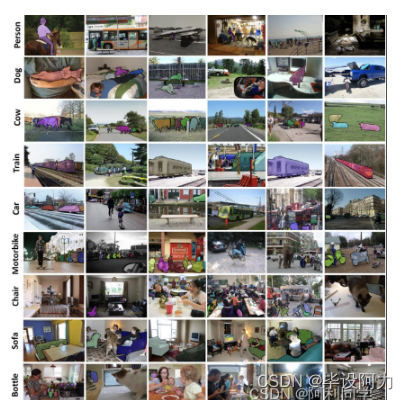
#图像分割#目标检测用!!!!!!!!!!!
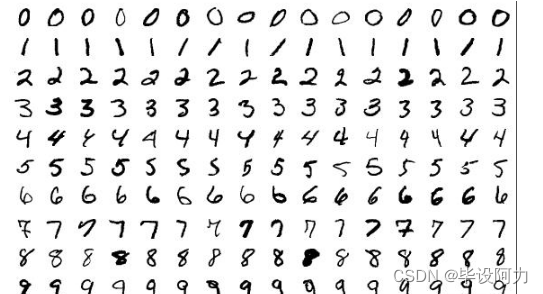
MNIST数据集
MNIST 数据库(修改后的国家标准和技术研究所数据库)是一个手写数字的大集合。它有一套包含60,000个例子的训练集和一套包含10,000个例子的测试集。它是一个较大的 NIST 特殊数据库3(美国人口普查局的雇员编写的数字)和特殊数据库1(高中生编写的数字)的子集,其中包含手写数字的单色图像。这些数字已经尺寸归一化,并在固定大小的图像中居中。来自 NIST 的原始黑白(双层)图像经过了尺寸标准化,以适应20x20像素的盒子,同时保留了它们的高宽比。由于归一化算法所采用的抗混叠技术,得到的图像含有灰度。通过计算像素质量中心,并将图像平移以使该点位于28x28视场的中心,使图像集中在28x28图像中心。
CIFAR-100数据集
CIFAR-100数据集(加拿大高级研究所,100个类)是Tiny Images数据集的子集,由60000张32x32彩色图像组成。CIFAR-100 中的 100 个类被分为 20 个超类。每个班级有600张图片。每个图像都带有一个“精细”标签(它所属的类)和一个“粗”标签(它所属的超类)。每类有 500 张训练图像和 100 张测试图像。
确定图像是否属于某个类的标准如下:
类名应该在“这张图片中有什么”这个问题的可能答案列表中名列前茅。
图像应该是照片般逼真的。贴标机被指示拒绝线条图。
图像应仅包含类所引用对象的一个突出实例。
该物体可能被部分遮挡或从不寻常的角度看到,只要其身份对贴标者仍然清晰可见。
Cityscapes数据集
城市景观是一个大型数据库,专注于城市街景的语义理解。它为 30 个类(平面、人类、车辆、构造、对象、自然、天空和虚空)提供语义、实例和密集像素注释。该数据集由大约5000张精细注释图像和20000张粗注释图像组成。在几个月,白天和良好的天气条件下,在50个城市捕获了数据。它最初被录制为视频,因此手动选择帧以具有以下功能:大量动态对象,不同的场景布局和不同的背景。

博客中提到的还有未提到的数据集都私信交流! 如果对你有帮助!还请点赞收藏!
企鹅耗子:767172261
更多【自动驾驶-深度学习/自动驾驶数据集大集合(目标检测/图像分割/语义分割/图像分类/)】相关视频教程:www.yxfzedu.com
相关文章推荐
- spring-idea中搭建Spring boot项目(借助Spring Initializer) - 其他
- 网络-# 深度解析 Socket 与 WebSocket:原理、区别与应用 - 其他
- prompt-屏幕提词软件Presentation Prompter mac中文版使用方法 - 其他
- java-AVL树详解 - 其他
- spring-在Spring Boot中使用JTA实现对多数据源的事务管理 - 其他
- 3d-原始html和vue中使用3dmol js展示分子模型,pdb文件 - 其他
- ddos-DDoS攻击剧增,深入解析抗DDoS防护方案 - 其他
- spring boot-AI 辅助学习:Spring Boot 集成 PostgreSQL 并设置最大连接数 - 其他
- golang-go中的rune类型 - 其他
- python-深度学习之基于Python+OpenCV(DNN)性别和年龄识别系统 - 其他
- 运维-Linux-Docker的基础命令和部署code-server - 其他
- 算法-421. 数组中两个数的最大异或值/字典树【leetcode】 - 其他
- 编程技术-解非线性方程python实现黄金分割法 - 其他
- 学习-Retrieval-Augmented Generation for Knowledge-Intensive NLP Tasks - 翻译学习 - 其他
- python-第三章:人工智能深度学习教程-基础神经网络(第四节-从头开始的具有前向和反向传播的深度神经网络 – Python) - 其他
- css-数据结构与算法 | 第四章:字符串 - 其他
- 编程技术-自媒体项目详述 - 其他
- aac-FFMPEG库实现mp4/flv文件(H264+AAC)的封装与分离 - 其他
- jvm-设计模式详解(十)——装饰器模式 - 其他
- hive-C++自动注册的工厂与--whole-archive - 其他
2):严禁色情、血腥、暴力
3):严禁发布任何形式的广告贴
4):严禁发表关于中国的政治类话题
5):严格遵守中国互联网法律法规
6):有侵权,疑问可发邮件至service@yxfzedu.com
