yolo-超维空间S2无人机使用说明书——32、使用yolov7进行目标识别
推荐 原创引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov7进行物体识别,同时系统兼容了低版本的yolo,包括基于C++的yolov3和yolov4,也有更高版本的yolov8。
简介,为了提高识别速度,系统采用了GPU进行加速,在使用7W功率的情况,大概可以稳定在20FPS,满功率情况下可以适当提高。
硬件:D435摄像头,Jetson orin nano 8G
环境:ubuntu20.04,ros-noetic, yolov7
步骤一: 启动摄像头,获取摄像头发布的图像话题
roslaunch realsense2_camera rs_camera.launch
没有出现红色报错,出现如下界面,表明摄像头启动成功
步骤二:启动yolov7识别节点
roslaunch yolov7 yolov7.launch
launch文件如下,参数device设置为cuda,因为实际使用GPU加速,不是CPU跑,另外参数img_topic是订阅的节点话题,一定要与摄像头发布的实际话题名称对应上。其他参数可以根据实际情况进行调整即可
<?xml version="1.0"?>
<launch>
<node pkg="yolov7" type="YoloV7.py" name="yolov7">
<!-- Path to your weight -->
<param name="weights_path" type="str" value="/home/cwkj/cwkj_ws/src/ros-yolov7/cfg/weights/yolov7-tiny.pt"/>
<!-- Path to a class_labels.txt file, if you leave it empty then no class labels are visualized.-->
<param name="classes_path" type="str" value="//home/cwkj/cwkj_ws/src/ros-yolov7/cfg/config/coco.txt" />
<!-- Input image topic name to subscribe to -->
<param name="img_topic" type="str" value="/camera/color/image_raw" />
<!-- [optional] Confidence threshold (default=0.25) -->
<param name="conf_thresh" type="double" value="0.20" />
<!-- [optional] Intersection over union threshold (default=0.45) -->
<param name="iou_thresh" type="double" value="0.45" />
<!-- [optional] Queue size for publishing (default=3) -->
<param name="queue_size" type="int" value="1" />
<!-- [optional] Image size to which to resize each input image before feeding into the network (the final output is rescaled to the original image size) (default=640) -->
<param name="img_size" type="int" value="640" />
<!-- [optional] Flag whether to also publish image with the visualized detections (default=false) -->
<param name="visualize" type="bool" value="true" />
<!-- [optional] Torch device 'cuda' or 'cpu' (default="cuda") -->
<param name="device" type="str" value="cuda" />
<!-- [optional] Node frequency (default=10) -->
<param name="frequency" type="int" value="10" />
</node>
</launch>
出现如下界面表示yolov7启动成功
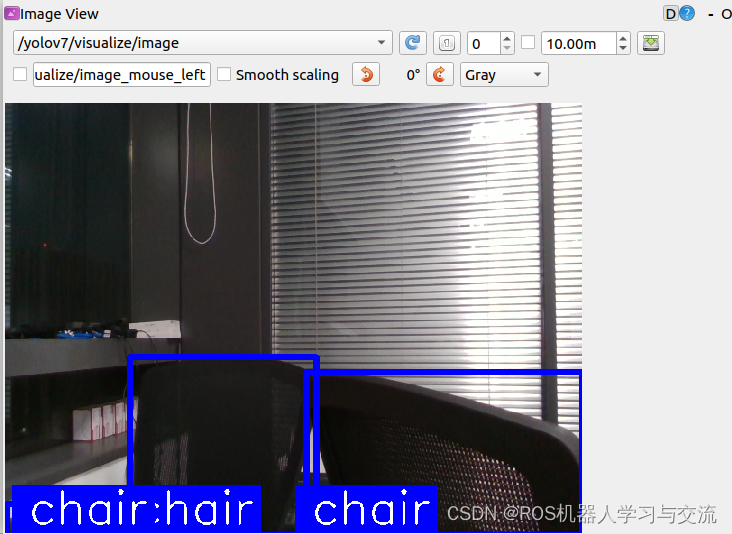
步骤三:打开rqt工具,查看识别效果
rqt_image_view

等待出现如下界面后,选择yolov7/visualize/image查看yolov7识别效果
总结:可以根据实际需要选择和是的yolo版本进行物体识别。系统中配置的基于darknet的yolov3和yolov4也有着非常好的识别效果。
更多【yolo-超维空间S2无人机使用说明书——32、使用yolov7进行目标识别】相关视频教程:www.yxfzedu.com
相关文章推荐
- 编程技术-JimuReport积木报表 v1.6.5 版本发布—免费报表工具 - 其他
- 编程技术-【Proteus仿真】【Arduino单片机】DHT11温湿度 - 其他
- 编程技术-Linux 下 JDK 安装(tar.gz版) - jdk8 - 其他
- 编程技术-前端开发好用的vscode插件 - 其他
- 编程技术-jQuery - AJAX get() 和 post() 方法 - 其他
- 编程技术-【Java 进阶篇】JQuery 案例:全选全不选,为选择添彩 - 其他
- java-java表白代码 - 其他
- 编辑器-Linux编辑器:vim的简单介绍及使用 - 其他
- 编辑器-将 ONLYOFFICE 文档编辑器与 С# 群件平台集成 - 其他
- 媒体-行业洞察:分布式云如何助力媒体与娱乐业实现创新与增长? - 其他
- 编辑器-wpf devexpress设置行和编辑器 - 其他
- 媒体-海外媒体发稿:彭博社发稿宣传中,5种精准营销方式 - 其他
- 编辑器-广州华锐互动:VR互动实训内容编辑器助力教育创新升级 - 其他
- hadoop-WPF ToggleButton 主题切换动画按钮 - 其他
- python-pytorch-gpu(Anaconda3+cuda+cudnn) - 其他
- gaussdb-大数据-之LibrA数据库系统告警处理(ALM-12039 GaussDB主备数据不同步) - 其他
- hive-大数据毕业设计选题推荐-智慧消防大数据平台-Hadoop-Spark-Hive - 其他
- python-【PyTorch教程】如何使用PyTorch分布式并行模块DistributedDataParallel(DDP)进行多卡训练 - 其他
- 编辑器-Linux编辑器---vim的使用 - 其他
- 矩阵-软文推广中媒体矩阵的优势在哪儿 - 其他
记录自己的技术轨迹
文章规则:
1):文章标题请尽量与文章内容相符
2):严禁色情、血腥、暴力
3):严禁发布任何形式的广告贴
4):严禁发表关于中国的政治类话题
5):严格遵守中国互联网法律法规
6):有侵权,疑问可发邮件至service@yxfzedu.com
近期原创 更多
