编程技术-ROS 通信机制
推荐 原创ROS是一个分布式框架,为用户提供多节点(进程)之间的通信服务,所有软件和功能都建立在这种分布式通信机制上,ROS的通信机制是最底层也是最核心的技术。
一、话题通信机制
话题在 ROS 中使用最为频繁,其通信模型也较为复杂。如图所示,在 ROS 中有两个节点:一个是发布者 Talker ,另一个是订阅者 Listener 。两个节点分别发布、订阅同一个话题,启动顺序没有强制要求,此处假设 Talker 首先启动,可分成图中所示的七步来分析建立通信的详细过程。
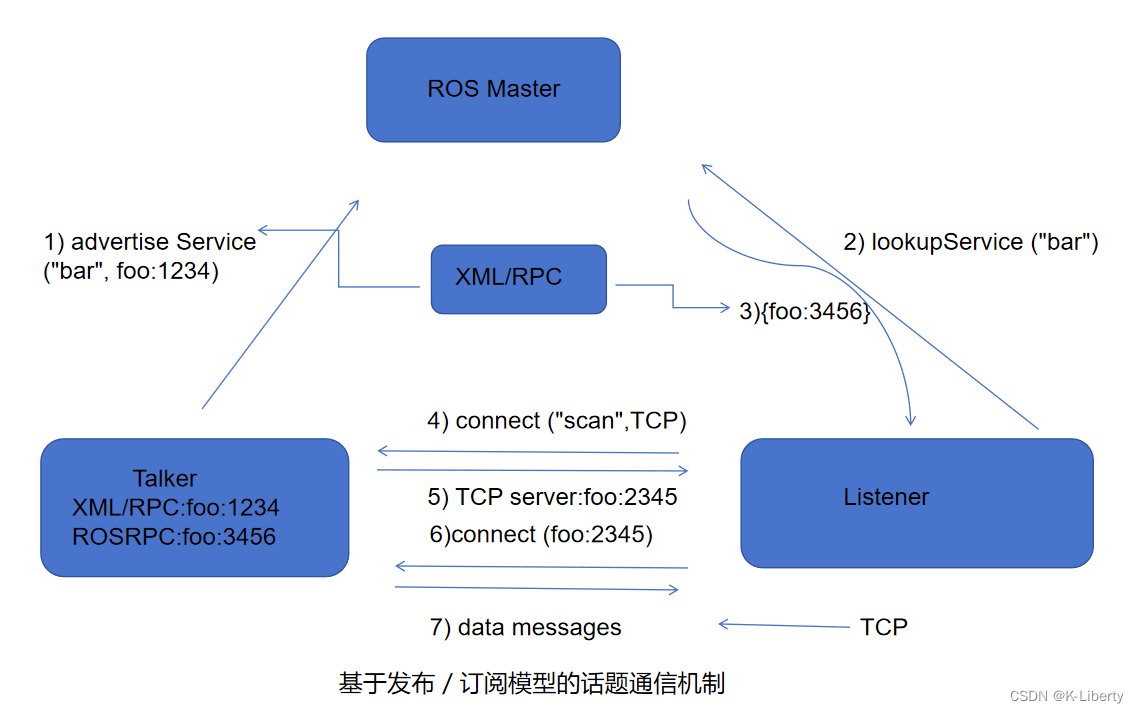
1.Talker注册
Talker启动,通过1234端口使用RPC向ROS Master注册发布者的信息,包含所发布消息的话题名;ROS Master会将节点的注册信息加入注册列表中。
2. Listener 注册
Listener启动,同样通过RPC向ROS Master注册订阅者的信息,包含需要订阅的话题名。3.ROS Master进行信息匹配
Master根据Listener的订阅信息从注册列表中进行查找,如果没有找到匹配的发布者,则等待发布者的加入;如果找到匹配的发布者信息,则通过RPC向Listener发送Talker的RPC地址信息。
4.Listener发送连接请求
Listener接收到Master发回的Talker地址信息,尝试通过RPC向Talker发送连接请求,传输订阅的话题名、消息类型以及通信协议(TCP/UDP)
5.Talker确认连接请求
Talker接收到Listener发送的连接请求后,继续通过RPC向Listener确认连接信息,其中包含自身的TCP地址信息
6. Listener 尝试与Talker 建立网络连接
Listener接收到确认信息后,使用TCP尝试与Talker建立网络连接。
7. Talker 向 Listener发布数据
成功建立连接后,Talker开始向Listener发送话题消息数据。
从上面的分析中可以发现,前五个步骤使用的通信协议都是RPC,最后发布数据的过程才使用到TCP。ROS Master在节点建立连接的过程中起到了重要作用,但是并不参与节点之间最终的数据传输。节点建立连接后,可以关掉 ROS Master,节点之间的数据传输并不会受到影响,但是其他节点也无法加入这两个节点之间的网络。
二、服务通信机制
服务是一种带有应答的通信机制,通信原理如图所示,与话题的通信相比,其减少了 Listener与Talker之间的RPC通信。
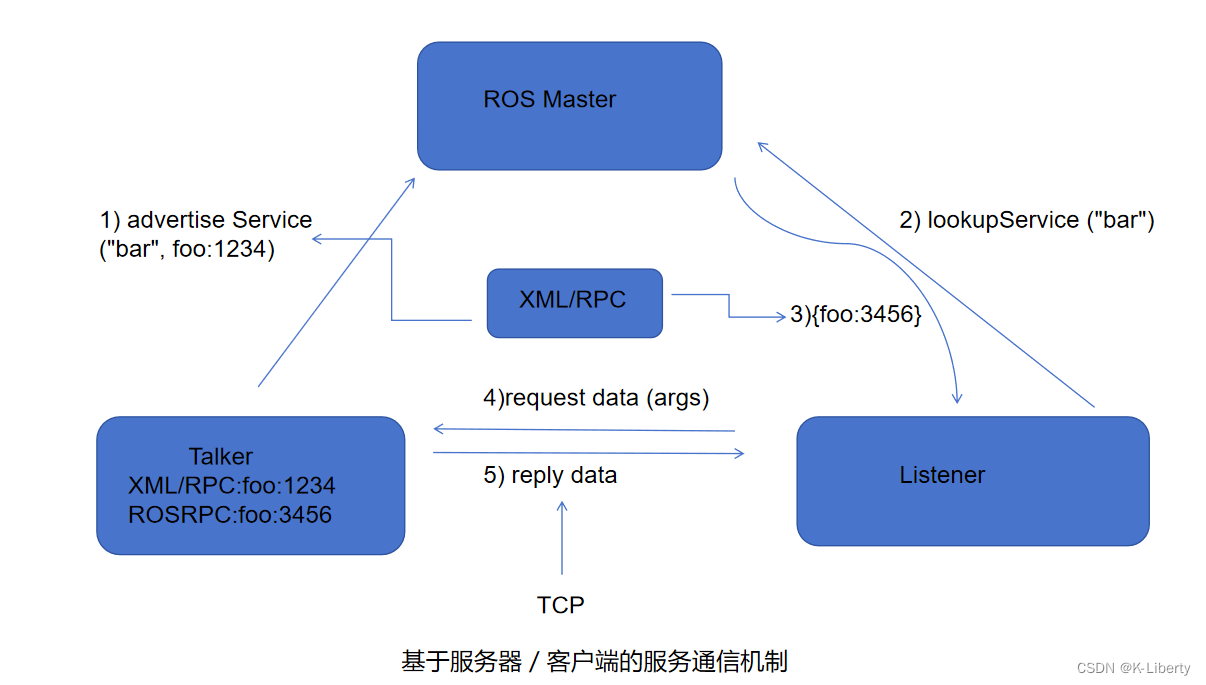
1.Talker注册
Talker启动,通过1234端口使用RPC向ROS Master 注册发布者的信息,包含所提供的服务名;ROS Master会将节点的注册信息加入注册列表中。
2. Listener注册
Listener启动,同样通过RPC 向 ROS Master注册订阅者的信息,包含需要查找的服务名。3.ROS Master进行信息匹配
Master根据 Listener的订阅信息从注册列表中进行查找,如果没有找到匹配的服务提供者,则等待该服务的提供者加入;如果找到匹配的服务提供者信息,则通过RPC向Listener 发送Talker的TCP地址信息。
4.Listener与Talker建立网络连接
Listener接收到确认信息后,使用TCP尝试与Talker建立网络连接,并且发送服务的请求数据。
5.Talker向Listener发布服务应答数据
Talker接收到服务请求和参数后,开始执行服务功能,执行完成后,向Listener发送应答数据。
三、参数管理机制
参数类似于ROS中的全局变量,由ROS Master进行管理,其通信机制较为简单,不涉
及TCP/UDP的通信,如图所示。
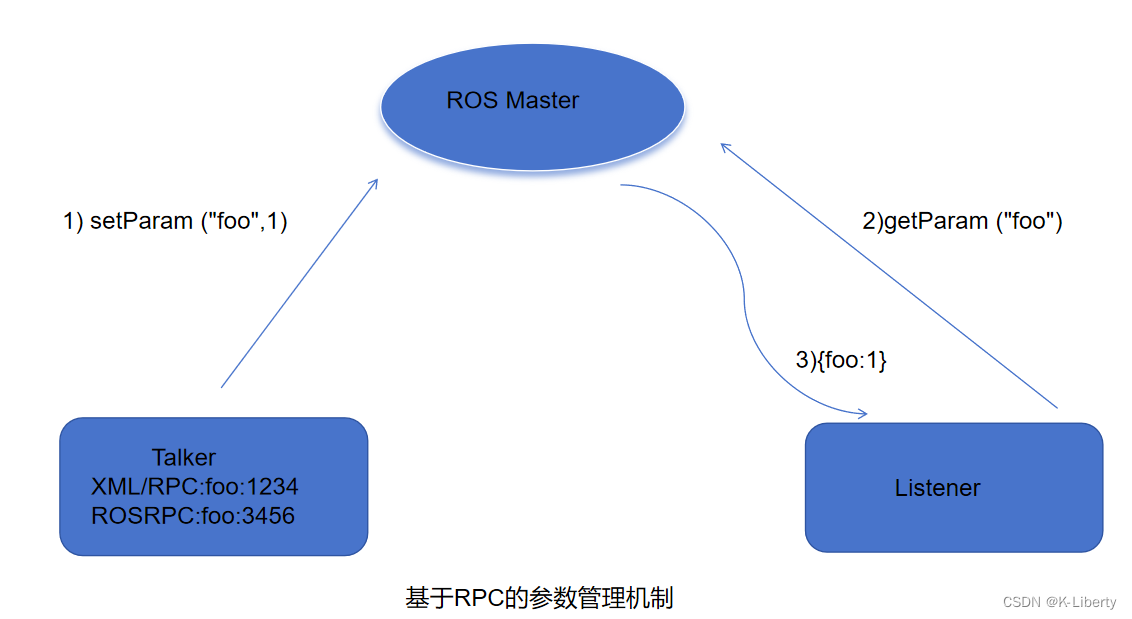
1.Talker设置变量
Talker 使用RPC向 ROS Master发送参数设置数据,包含参数名和参数值;ROS Master
会将参数名和参数值保存到参数列表中。
2Listeer查询参数值
Listener 通过RPC向ROS Master发送参数查找请求,包含所要查找的参数名。
3.ROS Master向 Listener发送参数值
Master 根据 Listener 的查找请求从参数列表中进行查找,查找到参数后,使用RPC将参数值发送给 Listener。
注意:如果 Talker 向Master 更新参数值,Listener在不重新查询参数值的情况下是无法知晓参数值已经被更新的。所以在很多应用场景中,需要一种动态参数更新的机制。
更多【编程技术-ROS 通信机制】相关视频教程:www.yxfzedu.com
相关文章推荐
- 科技-打造高效运营底座,极智嘉一体化软件系统彰显科技威能 - 其他
- golang-深入剖析Golang中单例模式 - 其他
- 网络-工业自动化工厂PLC远程控制网关物联网应用 - 其他
- react.js-React Native自学笔记 - 其他
- android-【Android】Lombok for Android Studio 离线插件 - 其他
- android-Android Studio新建项目下载依赖慢,只需一个操作解决 - 其他
- 后端-使用 Ruby 的 Nokogiri 库来解析 - 其他
- 编程技术-一、配置环境 - 其他
- 算法-03 矩阵与线性变换 - 其他
- android-Android Studio(控件常用属性) - 其他
- 编程技术-ES使用ik分词器查看分词结果及自定义词汇 - 其他
- asp.net-asp.net水资源检测系统VS开发sqlserver数据库web结构c#编程Microsoft Visual Studio - 其他
- 编程技术-jQuery中遍历元素each - 其他
- 编程技术-rabbitmq下载安装教程 - 其他
- 编程技术-Codeforces Round 908 - 其他
- 编程技术-Leetcode543. 二叉树的直径 - 其他
- 机器学习-IBM Qiskit量子机器学习速成(一) - 其他
- 编程技术-3D模型格式转换工具HOOPS Exchange如何获取模型的特征树? - 其他
- 编程技术-电脑出现“此驱动器存在问题请立即扫描”该怎么办? - 其他
- metersphere-社区分享|杭银消费金融基于MeterSphere开展接口自动化测试 - 其他
2):严禁色情、血腥、暴力
3):严禁发布任何形式的广告贴
4):严禁发表关于中国的政治类话题
5):严格遵守中国互联网法律法规
6):有侵权,疑问可发邮件至service@yxfzedu.com
