yolo-yolov9直接调用zed相机实现三维测距(python)
推荐 原创相关链接
此项目直接调用zed相机实现三维测距,无需标定,相关内容如下:
1. yolov4直接调用zed相机实现三维测距
2.yolov5直接调用zed相机实现三维测距(python)
3. yolov8直接调用zed相机实现三维测距(python)
4.具体实现效果已在哔哩哔哩发布,点击此链接跳转
本篇博文工程源码下载(麻烦github给个星星)
下载链接:https://github.com/up-up-up-up/zed-yolov9
附:Zed调用YOLOv7测距也已经实现,但是3060笔记本6G显存带不动,在大现存服务器上可以运行,可能是由于YOLOv7网络结构导致的,由于不具备普适性,就不再写相关文章了,有需要的可以仿照这个代码去改写
1. 相关配置
python==3.7
Windows-pycharm
zed api 具体配置见 (zed api 配置步骤)
2. 相关代码
2.1 相机设置
zed = sl.Camera()
input_type = sl.InputType()
if opt.svo is not None:
input_type.set_from_svo_file(opt.svo)
# Create a InitParameters object and set configuration parameters
init_params = sl.InitParameters(input_t=input_type, svo_real_time_mode=True)
init_params.camera_resolution = sl.RESOLUTION.HD720
init_params.coordinate_units = sl.UNIT.METER
init_params.depth_mode = sl.DEPTH_MODE.ULTRA # QUALITY
init_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UP
init_params.depth_maximum_distance = 5
runtime_params = sl.RuntimeParameters()
status = zed.open(init_params)
2.2 测距模块
for *xyxy, conf, cls in reversed(det):
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
cent_x = round(xywh[0] * im0.shape[1])
cent_y = round(xywh[1] * im0.shape[0])
cent_w = round(xywh[2] * im0.shape[1])
point_1 = round(cent_x - 0.4 * cent_w)
point_2 = round(cent_x + 0.4 * cent_w)
wide_value_1 = point_cloud.get_value(point_1, cent_y)[1]
wide_value_2 = point_cloud.get_value(point_2, cent_y)[1]
try:
wide = round(wide_value_1[0], 4) - round(wide_value_2[0], 4)
wide = round(abs(wide * 1000))
except:
wide = 0.00
pass
point_cloud_value = point_cloud.get_value(cent_x, cent_y)[1]
point_cloud_value = point_cloud_value * -1000.00
if point_cloud_value[2] > 0.00:
try:
point_cloud_value[0] = round(point_cloud_value[0])
point_cloud_value[1] = round(point_cloud_value[1])
point_cloud_value[2] = round(point_cloud_value[2])
print("x:", point_cloud_value[0], "y:", point_cloud_value[1], "z:",
point_cloud_value[2], "W:", wide)
txt = 'x:{0} y:{1} z:{2} w:{3}'.format(point_cloud_value[0], point_cloud_value[1],
point_cloud_value[2], wide)
a=point_cloud_value[0]
b=point_cloud_value[1]
c=point_cloud_value[2]
distance = ((a ** 2 + b ** 2 + c ** 2) ** 0.5)
# annotator.box_label(xyxy, txt, color=(255, 0, 0))
label = f'{names[int(cls)]} {conf:.2f} '
label = label + " " +"dis:" +str(distance)
annotator.box_label(xyxy, label, color=colors(c, True))
except:
pass
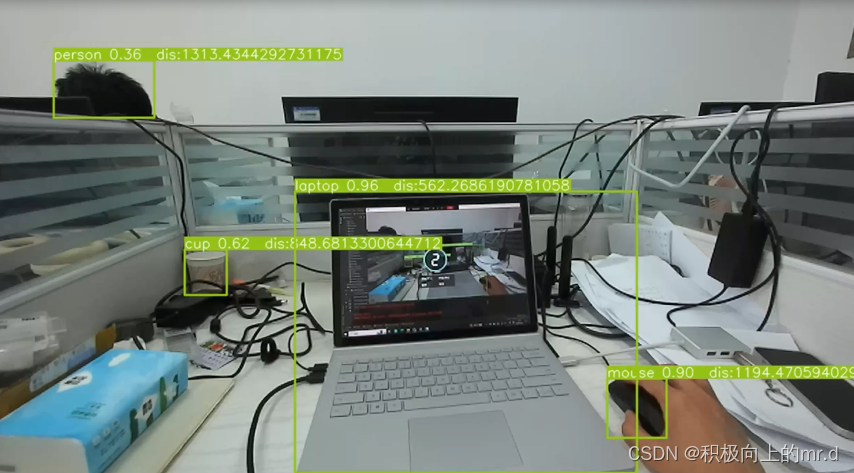
2.2 实验结果
测距功能
视频展示
更多【yolo-yolov9直接调用zed相机实现三维测距(python)】相关视频教程:www.yxfzedu.com
相关文章推荐
- 物联网-基于STM32的设计智慧超市管理系统(带收银系统+物联网环境监测) - 其他
- python-【Python基础】 Python设计模式之单例模式介绍 - 其他
- 物联网-物联网对接协议 - 其他
- 安全-远程运维用什么软件?可以保障更安全? - 其他
- 阿里云-STM32G0+EMW3080+阿里云飞燕平台实现单片机WiFi智能联网功能(三)STM32G0控制EMW3080实现IoT功能 - 其他
- 前端框架-vue项目中页面遇到404报错 - 其他
- 安全-vivo 网络端口安全建设技术实践 - 其他
- 前端框架-前端框架Vue学习 ——(五)前端工程化Vue-cli脚手架 - 其他
- 物联网-ZZ038 物联网应用与服务赛题第D套 - 其他
- 爬虫-网络爬虫的实战项目:使用JavaScript和Axios爬取Reddit视频并进行数据分析 - 其他
- c语言-ZZ038 物联网应用与服务赛题第C套 - 其他
- c语言-cordova Xcode打包ios以及发布流程(ionic3适用) - 其他
- 物联网-Xcode15 framework ‘CoreAudioTypes‘ not found - 其他
- 科技-打造高效运营底座,极智嘉一体化软件系统彰显科技威能 - 其他
- golang-深入剖析Golang中单例模式 - 其他
- 网络-工业自动化工厂PLC远程控制网关物联网应用 - 其他
- react.js-React Native自学笔记 - 其他
- android-【Android】Lombok for Android Studio 离线插件 - 其他
- android-Android Studio新建项目下载依赖慢,只需一个操作解决 - 其他
- 后端-使用 Ruby 的 Nokogiri 库来解析 - 其他
记录自己的技术轨迹
文章规则:
1):文章标题请尽量与文章内容相符
2):严禁色情、血腥、暴力
3):严禁发布任何形式的广告贴
4):严禁发表关于中国的政治类话题
5):严格遵守中国互联网法律法规
6):有侵权,疑问可发邮件至service@yxfzedu.com
近期原创 更多
